
AI時(shí)代,數(shù)據(jù)成為智能車關(guān)鍵決勝點(diǎn)之一,它能訓(xùn)練輔助駕駛做出更聰明、類人的決策,推動(dòng)著輔助駕駛競爭進(jìn)入下一賽道。
馬斯克曾說,到了 1000 萬個(gè)Clips(訓(xùn)練視頻),系統(tǒng)的表現(xiàn)就變得難以置信了。
不少品牌都突破了這個(gè)訓(xùn)練量,比如本期《超級開箱》的三款SUV:搭載華為乾崑ADS3.3.2版本輔助駕駛系統(tǒng)的智界R7,首發(fā)1000萬Clips版本端到端輔助駕駛系統(tǒng)的小米YU7以及搭載FSD、主動(dòng)邀請友商對比的特斯拉Model Y。
那么高訓(xùn)練量的輔助駕駛系統(tǒng)表現(xiàn)有多類人?
自主品牌輔助駕駛和海外FSD誰更強(qiáng)?
最新版本的華為輔助駕駛和小米輔助駕駛表現(xiàn)都如何?
我們對這三款車進(jìn)行了城區(qū)領(lǐng)航以及主動(dòng)安全兩方面的測試,包含能拉開差距的高難度場景。看完視頻,你大概就對以上問題有了答案。
由于目前只有老款特斯拉可以啟用FSD,所以城區(qū)領(lǐng)航環(huán)節(jié)我們使用老款特斯拉ModelY,主動(dòng)安全測試環(huán)節(jié)我們使用新款Model Y。
城區(qū)領(lǐng)航
城區(qū)領(lǐng)航測試是在蘇州進(jìn)行的,全程超70km,覆蓋城區(qū)主干道、人車混流狹窄單行道、鄉(xiāng)村道路等多種路況。
路口通過能力直接影響到領(lǐng)航路線的正確性,所以我們挑選了一些代表性路口,來看看三款車的通過情況:
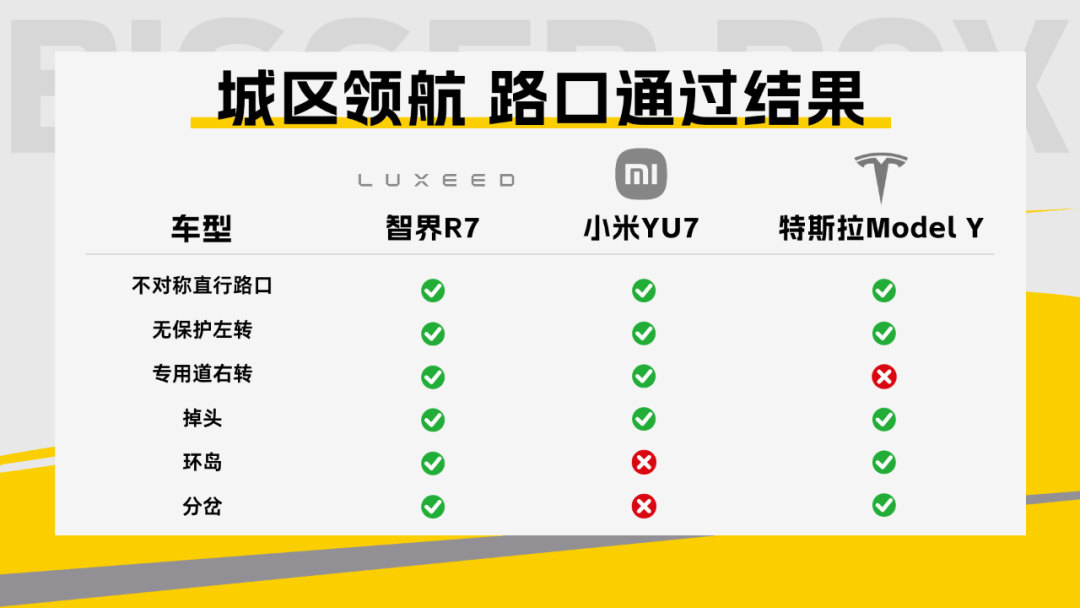
這三款車直行、轉(zhuǎn)彎、掉頭的基礎(chǔ)功都還不錯(cuò),不過在專用道進(jìn)行右轉(zhuǎn)的場景里,中西輔助駕駛就展示出了明顯差異。
R7和小米YU7輕松實(shí)現(xiàn)右轉(zhuǎn),但特斯拉Model Y卻沒有調(diào)整好對于非機(jī)動(dòng)車道的策略,所以在進(jìn)入右轉(zhuǎn)專用道后試圖擠入狹窄的非機(jī)動(dòng)車道,可能是因?yàn)樵诤M?ldquo;老家”沒碰到這樣的問題所以沒做優(yōu)化。

從功能覆蓋度上來說,智界R7、小米YU7和特斯拉Model Y對于不同路況的包容性是很強(qiáng)的。比如狹窄的石子路街巷、沒有車道線的商業(yè)美食區(qū),以及偏僻鄉(xiāng)村等 ,基本都可以啟動(dòng)功能。
再來看三款車在路上應(yīng)對各種障礙物的能力。
對行人、非機(jī)動(dòng)車、臨停車的基礎(chǔ)繞行能力都還不錯(cuò),但在高密集障礙區(qū)里,三者表現(xiàn)就截然不同。
特斯拉Model Y整體感知能力很強(qiáng),但似乎有點(diǎn)“近視”。比如它在一次提前繞行右側(cè)瓜筐時(shí)由于左側(cè)也受限所以沒拉開太大距離,離近時(shí)就差點(diǎn)壓著人家瓜框。
它在開闊區(qū)域的繞行表現(xiàn)非常優(yōu)秀,但離人近時(shí)就會(huì)停滯。

這也是特斯拉FSD一直以來的特點(diǎn),它的這套做法在美國倒是沒什么問題,起到了很好的禮讓效果,而且通常能指引周邊人迅速離開。 但國內(nèi)多行人穿梭、人車混流,這種情況,特斯拉屬實(shí)吃不消。
智界R7的表現(xiàn)就更成熟,慢速地左繞右繞,在人群中穿行。
小米的敏感度則處于中間,有避讓主動(dòng)性,但是碰到對方過來速度較快時(shí)就會(huì)停滯或要求駕駛員手動(dòng)駕駛。
對于錐桶占道,三款車也都可以變道避開,較靈活。
主動(dòng)安全
不打開領(lǐng)航輔助的時(shí)候,這三款車的主動(dòng)安全能為車主帶來多少保障呢?我們來專業(yè)封閉測試場地,還原了5個(gè)高頻風(fēng)險(xiǎn)場景,測試結(jié)果如圖:

靜止水馬
前四個(gè)項(xiàng)目的起測速度為35km/h,測試上限為125km/h。
最后一個(gè)前車切出遇靜止正車尾項(xiàng)目由于多發(fā)于高速所以起測速度為80km/h,測試上限為120km/h。
第一個(gè)靜止水馬項(xiàng)目,特斯拉讓我們痛失兩萬四!
特斯拉AEB功能對水馬毫無反應(yīng),但是它標(biāo)配的“行人保護(hù)裝置”非常敏感,一旦彈開,就要將相關(guān)零部件全部更換,而且維修費(fèi)昂貴。在這里,我們替廣大特斯拉車主發(fā)聲,廠家優(yōu)化一下“行人保護(hù)裝置”,比如降低維修成本等操作。

所以,后續(xù)AEB項(xiàng)目我們又換了一臺新款Model Y,但是受限于“行人保護(hù)裝置”,測試員都是在盡量極限的狀態(tài)下,預(yù)判AEB功能不成功就人駕避讓,所有數(shù)據(jù)大家酌情參考。
小米YU7和特斯拉Model Y的AEB對靜止水馬都沒反應(yīng)。
智界R7則可以做到在125km/h的速度下還能穩(wěn)定剎停。
智界R7在低速狀態(tài)時(shí)會(huì)選擇較晚觸發(fā)AEB,但提速以后,AEB的觸發(fā)點(diǎn)也會(huì)提前,所以它的AEB表現(xiàn)為不太會(huì)誤觸發(fā),同時(shí)結(jié)合自身車速、必要?jiǎng)x車距離來決定AEB觸發(fā)點(diǎn)的邏輯偏合理。
日間成人橫穿
日間成人橫穿已經(jīng)被納入最新國標(biāo),預(yù)計(jì)2028年實(shí)施。
特斯拉在35km/h的速度下有觸發(fā)制動(dòng)但是非常晚,和駕駛員決定手動(dòng)極限避讓的點(diǎn)差不多。
小米YU7和智界R7都做到了較高時(shí)速避障,其中智界R7再次刷到125km/h狀態(tài)下剎停。

日間非機(jī)動(dòng)車斜穿
日間非機(jī)動(dòng)車斜穿,還原了國內(nèi)部分地區(qū)的交通特色。
特斯拉Model Y 和小米YU7有預(yù)警但無法剎停避障。
智界R7在105km/h的速度下可以預(yù)警剎停避障,115km/h的速度時(shí)候也會(huì)預(yù)警并制動(dòng),但是制動(dòng)力不夠,會(huì)碰撞。

夜間逆光兒童鬼探頭
夜間逆光兒童鬼探頭是最難的一個(gè)項(xiàng)目,兒童以5km/h的速度在障礙車后沖出,碰撞點(diǎn)為50%,對向的燈光極其刺眼,駕駛員都覺得吃力。
在這種環(huán)境下,特斯拉無法及時(shí)剎車避免碰撞。
小米YU7和智界R7分別能在55km/h的速度和65km/的速度下能夠剎停避障,整體表現(xiàn)都不錯(cuò),畢竟這種低可見度環(huán)境,大家一般開車速度都會(huì)偏慢。

前車切出遇靜止正車尾
前車切出遇靜止正車尾,留給測試車的反應(yīng)時(shí)間很短。
小米YU7在80km/h的狀態(tài)下可以預(yù)警剎停,但剎停后會(huì)釋放,所以車主萬一碰到這種情況記得自己補(bǔ)一腳剎車,避免追尾。
速度提到100km/h時(shí)小米YU7也有反應(yīng),但是剎不住了。
特斯拉Model Y是80km/h速度時(shí)可以預(yù)警剎停,而且制動(dòng)的距離更有安心感。
到100km/h時(shí)有預(yù)警,但剎車點(diǎn)太晚,駕駛員選擇手動(dòng)避讓。
智界R7在80km/h以及100km/h的速度下都觸發(fā)AEB剎車避障。
到了120km/h的時(shí)速下,系統(tǒng)預(yù)判距離不夠剎停,直接觸發(fā)了eAES增強(qiáng)自動(dòng)緊急轉(zhuǎn)向輔助避障,也就是當(dāng)車輛檢測出有碰撞風(fēng)險(xiǎn)且僅靠制動(dòng)無法避免碰撞時(shí),eAES在緊急制動(dòng)的同時(shí)還會(huì)控制車輛轉(zhuǎn)向進(jìn)行橫向避讓。
我們還嘗試了一次130km/h的測試速度,也觸發(fā)了eAES安全避讓。
主動(dòng)安全部分整體表現(xiàn)為,智界R7保持了華為系統(tǒng)一貫的高時(shí)速高水準(zhǔn),小米升級新版本后進(jìn)步也很大,而特斯拉目前還沒有在AEB功能上發(fā)力。
寫在最后
大數(shù)據(jù)推動(dòng)城區(qū)領(lǐng)航輔助的可用度飛速上漲,系統(tǒng)已經(jīng)能應(yīng)對大部分路段,以此幫助駕駛員減輕疲勞。
不過風(fēng)險(xiǎn)通常在一瞬間,有時(shí)領(lǐng)航輔助或AEB可以處理,帶來“人機(jī)雙保險(xiǎn)” 的安全冗余,但絕對有處理不了的情況,駕駛員要專心駕駛,合理利用輔助駕駛系統(tǒng)的價(jià)值。
那么看完本期視頻,大家覺得智界R7、小米YU7、特斯拉Model Y 誰的表現(xiàn)你最滿意?
升級最新版本的智界R7和小米YU7的表現(xiàn)有沒有超出你的預(yù)期?評論區(qū)等你的答案哦。